Reactive Depth Management via Physical Computing

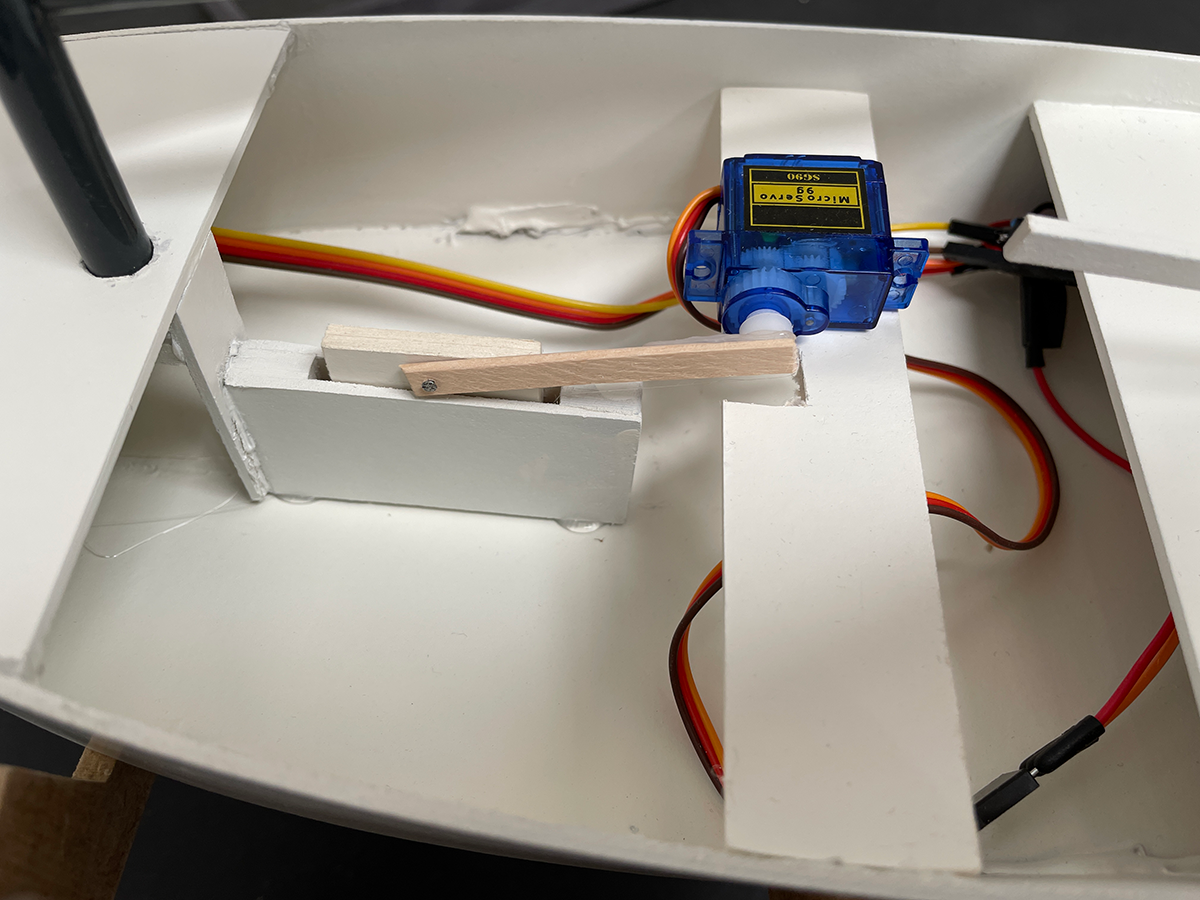
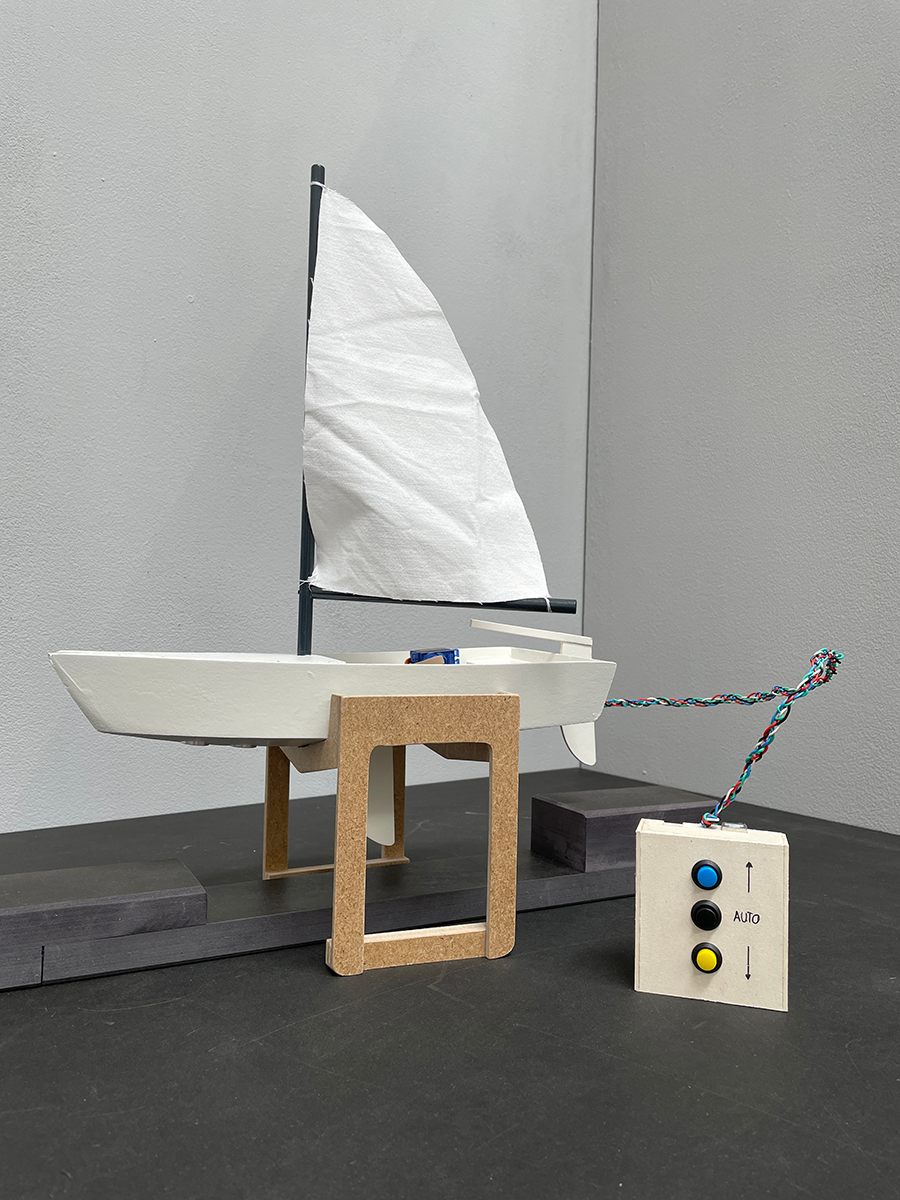
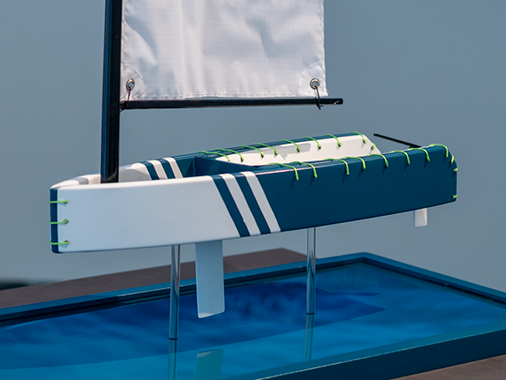
How can technology make safety and handling in sailing more intuitive? In this project during my second semester at Aachen University of Applied Sciences, I developed a system that protects dinghies from grounding. The concept uses an ultrasonic sensor integrated into the bow that scans the water depth beneath the hull in real time. As soon as an obstacle or shallowing water is detected, the system calculates the remaining distance to the centerboard tip. A servo motor handles the physical response and automatically raises the centerboard to prevent a collision. Via an interface remote control, the user has control and can choose between an autonomous automatic mode and manual control (Up/Down).
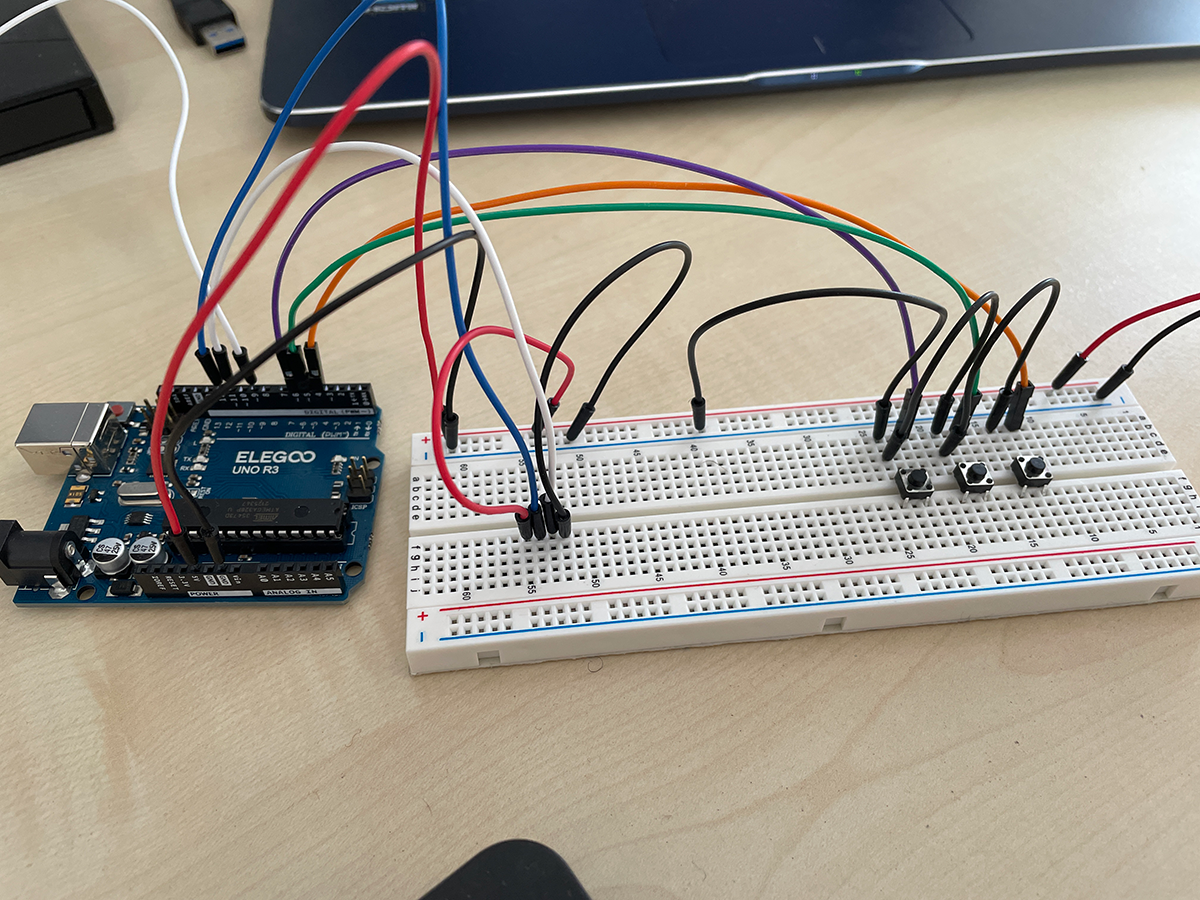
Shown here is a functional Arduino-based prototype that demonstrates how the sensor technology and mechanics work together.